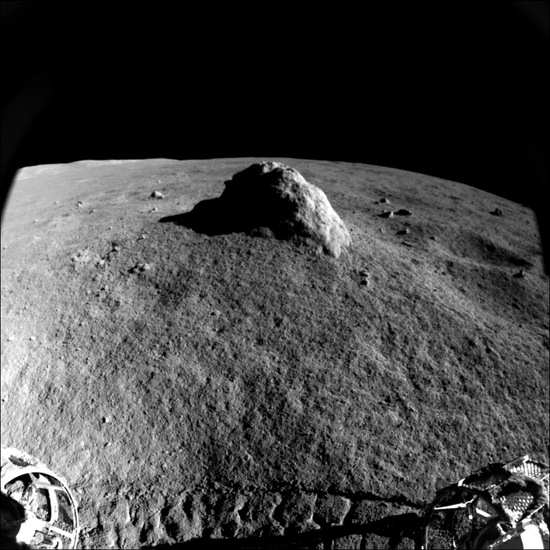
月背虽苍茫,但总有一些令人心驰神往的宝藏牵引着驾驶员们一个月接着一个月去探索追寻,几个月昼前,玉兔二号发现了一块剑齿状的石块,犹如龙背上的鳍片,科学家和驾驶员们同时对这样奇异的地貌表达了浓厚的兴趣,他们为它起了个昵称:“龙脊”,决定对它一探究竟。
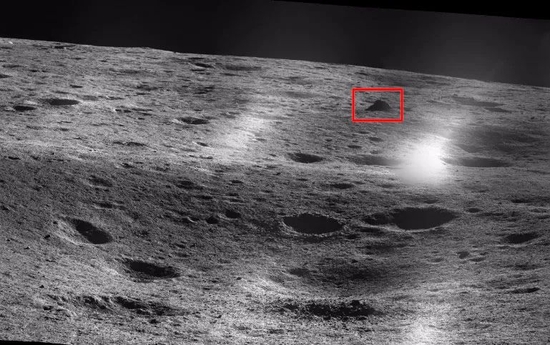
经过连续几个月昼的大步流星和翻山越岭,熬过几次“失眠”危机,眼看着目的地越来越近,驾驶员们也越来越兴奋。第40月昼休眠前,玉兔二号终于与“龙脊”隔坑相望了。
访“龙脊”全纪录
趁着玉兔睡觉,驾驶员们开始为下一步行走进行规划,然而地形分析结果却给大家泼了一盆冷水,诸多撞击坑环伺“龙脊”,形成一个天然保护圈,要想接近,势必要穿越这九曲回肠的坑洼路,翻越那层峦叠嶂的斜陡坡,从两个撞击坑中间的“一线天”横渡,技术难度直接满分!

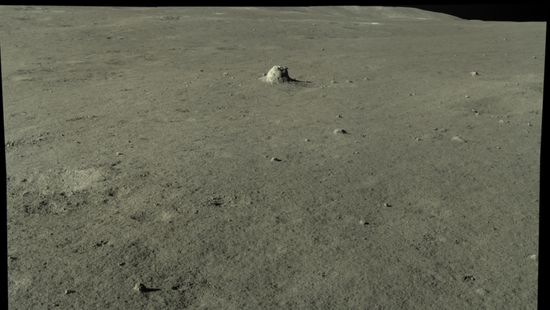
2022年3月26日9时28分,醒来的玉兔二号即刻踏上征途,接连3步,在月昼上午以一个接近直角的折线走位,完成了25米的移动,来到了“龙脊”的正北方向,直线距离11米,简直就是触手可及。
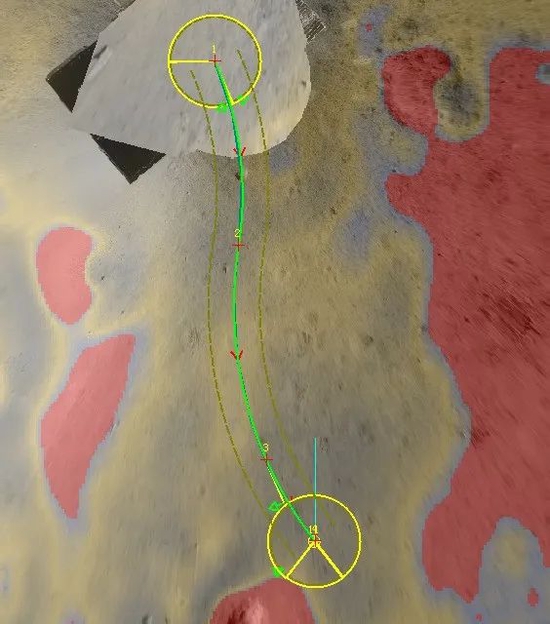
趁着月午玉兔休息,驾驶员们对最后这一步进行分析推演。等高线图上几乎被不可通行的红色撞击坑区域填满,独独剩下一个“独木桥”,这唯一的路上不仅需要翻越一道超过9°的斜坡进入东侧撞击坑的内沿,还要在坑内壁位置找到一块坡度较缓的区域作为“探测平台”,才能抵近“龙脊”进行探测。每一个约束条件的背后都是多个风险点,任何一个要素的无法满足都可能给后续的探测带来无穷后患。
天公作美,在东侧撞击坑内居然恰好存在着这样一块坡度较缓的区域,但是驾驶员们还是心里打鼓:翻越一个9°的斜坡能不能保证控制依旧精准?进入这么大的撞击坑的内壁会不会产生侧面滑坡?谨慎的驾驶员很明白,月背的一步之遥随时可能是万劫不复的深渊。
另外休眠点的计算结果也不容乐观,通往“龙脊”的探测之路毫无歇脚之地,最近的休眠区在当前位置的西北侧,这与探测方向截然相反。这就意味着必须在第一天完成探测并返回,原本一步的移动时间要走两步,还要完成一次完美的探测,这需要一个极致的往返探测方案、一个技术精湛的月面驾驶团队所有人的完美配合。
所有的难度和挑战犹如一座座山横亘在驾驶员面前,但是再难也没有让大家退缩,他们不仅对玉兔有信心,也对长期以来大家谨慎驾驶总结的经验和完备的方案有信心,迎难而上,走起!驾驶员们首先结合光照、测控、本体阴影等条件再次对探测路线和探测步骤进行设计验证,还联合院校的科研团队一同从滑移率、通行性等指标对行驶路线计算复核,还对执行这项操作的驾驶员进行强化训练和情景推演,设计出高效折返移动模式,将每个步骤耗时精确到分钟级、误差精确到厘米级。
一切准备就绪,驾驶员们在清明节期间驾驶玉兔开始了这次危机重重的“踏青”之旅。
驾驶员们首先控制玉兔二号一个“S”型走位巧妙地避开了途中的石块,翻越了9°的斜坡,移动9.8米来到了探测的起点,控制依然精准,让人担心的误差并没有出现,探访之路开了个好头。
随后,大家调整航向对准“龙脊”前进,目标的面貌逐渐清晰,近一点!再近一点!驾驶员们小心翼翼地向前驱动了近一米的距离,开始了首次的红外探测,结果出来后,红外视场中出现了部分阴影,科学家们表示有些遗憾,希望能够再近一点完全窥得“龙脊”的奥妙。
此时已是深夜,面对逼近的测控弧段后限,驾驶员们压力骤增,但是“龙脊”的诱惑还是让大家想要尽善尽美完成探测。驾驶员们再次控制玉兔前进5厘米后,又进行了第二次红外探测。结果呈现,探测目标光亮部分完美地出现在红外视场内!

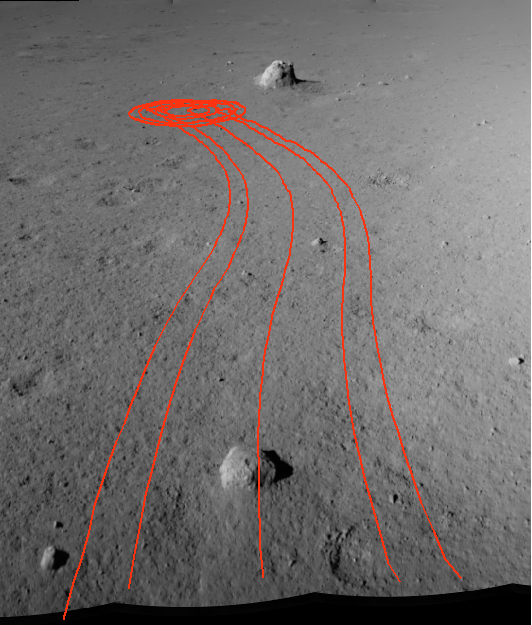
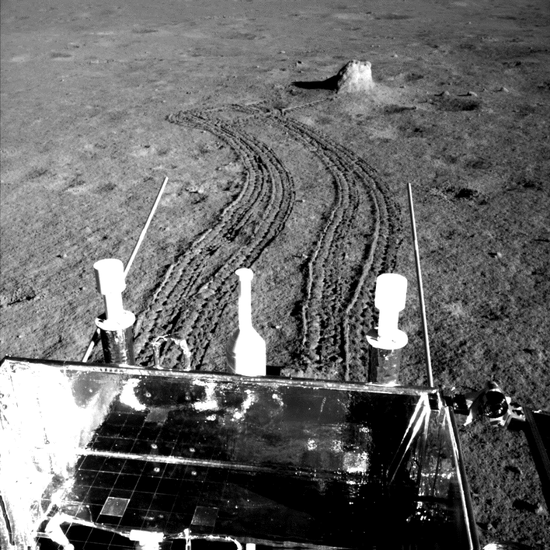
驾驶员们来不及高兴,还有一场惊心动魄的撤退工作在等着他们,安全撤回到月午位置附近,这次折返探测才能称得上成功。他们首先控制玉兔直线后退至探测起点附近,避障相机的图片详实地记录了此次探测的印记。
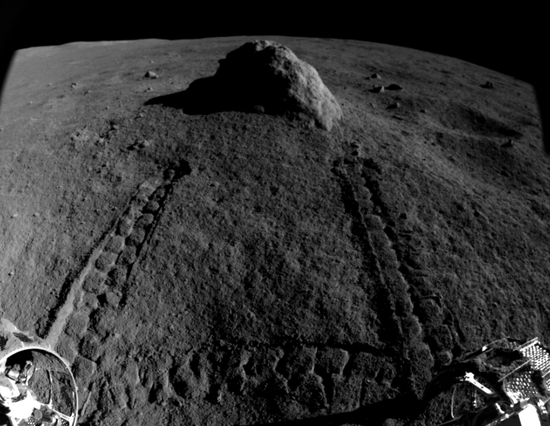
撤离后,玉兔再次回望“龙脊”和车辙,恰逢清明期间,玉兔此时面对不知道横亘在月背几百万年的“龙脊”巨石,仿佛也在祭扫祈福,别有一番趣味。
精心设计为休眠
告别“龙脊”就要抓紧休眠了,由于玉兔本体和移动悬架等因素影响,使得计算的休眠点姿态和实际存在一定误差,驾驶员们精心挑选了一个范围较大的休眠区,但没人能打包票一定可以完全覆盖,这次的休眠点姿态几乎都在指标边界,驾驶员们也期待探测的好运可以延续到休眠。
第一次寻找休眠点的移动很快完成了,到位后车轮未回零,遥测显示三轴姿态为滚动角超过了下限要求0.04°,驾驶员们根据转弯的中间遥测判断,右转后滚动角能够变小,便组织了右转2度,遥测显示此时只有0.001°差距了,驾驶员们祈祷这次回零能够力挽狂澜,结果回轮后角度却又变大,超了0.06°,此处不能休眠。
怎么办,前后移动碰碰运气?还是再组织往远处的大片休眠点再移动一步?要知道,上次出现休眠姿态不符合的时候,驾驶员们为了寻找休眠点,工作了一个通宵。难道又要昨日重现?
此时经验丰富的驾驶员分析发现,玉兔西北侧一米内恰好有几处稀疏的休眠区,可以一试。但也要面临计算角度和实际之间的误差问题,万一到位后还是不行又该怎么办?
一连串设想被驾驶员们提出又自我否定,好几个问题的答案几乎是反的,怎么办呢?反的……突然灵光一闪,我们能不能反向操作呢?我们做一次休眠航向的反方向移动,这样我们的俯仰角和滚动角不都是数值相同,符号相反的数值吗?
但另外一个问题来了,这片区域跟当前位置的夹角也不是休眠姿态的补角啊!铁人说过,有条件要上,没有条件创造条件也要上!我们可以创造一个补角!驾驶员们从目的地拉了一条沿着休眠航向相反方向的行驶路线,然后在靠近当前休眠区域取了个交点作为中间转折位置,并在前往目标点的直线上设了个停泊点,玉兔只要首先走到左上方位置,然后沿着休眠航向的反方向行进就能到达目标点了,转折点、直线中间点和目标终点,三个点只要有一个满足休眠姿态要求,玉兔就可以就地休眠了!

设计完备后,驾驶员们再次控制玉兔朝着既定方向驱动前进。转折终点很快到了,驾驶员们屏住呼吸,目光寸步不离开大屏上的监视数据,没有符合要求……紧接着前往第二个点,这个点看起来没有在休眠区内,但是当车驻足后,遥测显示应该是符合休眠要求的,驾驶员们随即操控玉兔转到休眠航向,姿态稳稳落在了休眠范围内!驾驶员们紧绷的神经终于可以松了下来,事实证明,唯有用心精妙设计,才能月背行稳致远!